Automating Mixed-Reality Capture
Defining the interaction model for machine perception and automated environment scanning on Quest.
01 // The Challenge
Designing for Imperfect Eyes
Mixed Reality (MR) depends on the headset understanding the physics of the room. Early Quest devices relied on users manually "drawing" their walls—a high-friction process that resulted in poor data.
The business goal was "Automated Scanning," but the technology wasn't ready. The computer vision (SLAM) teams were struggling with reliability. They needed a design strategy that could handle the ambiguity of the real world: open floor plans, messy rooms, and occlusion.
02 // The System Model
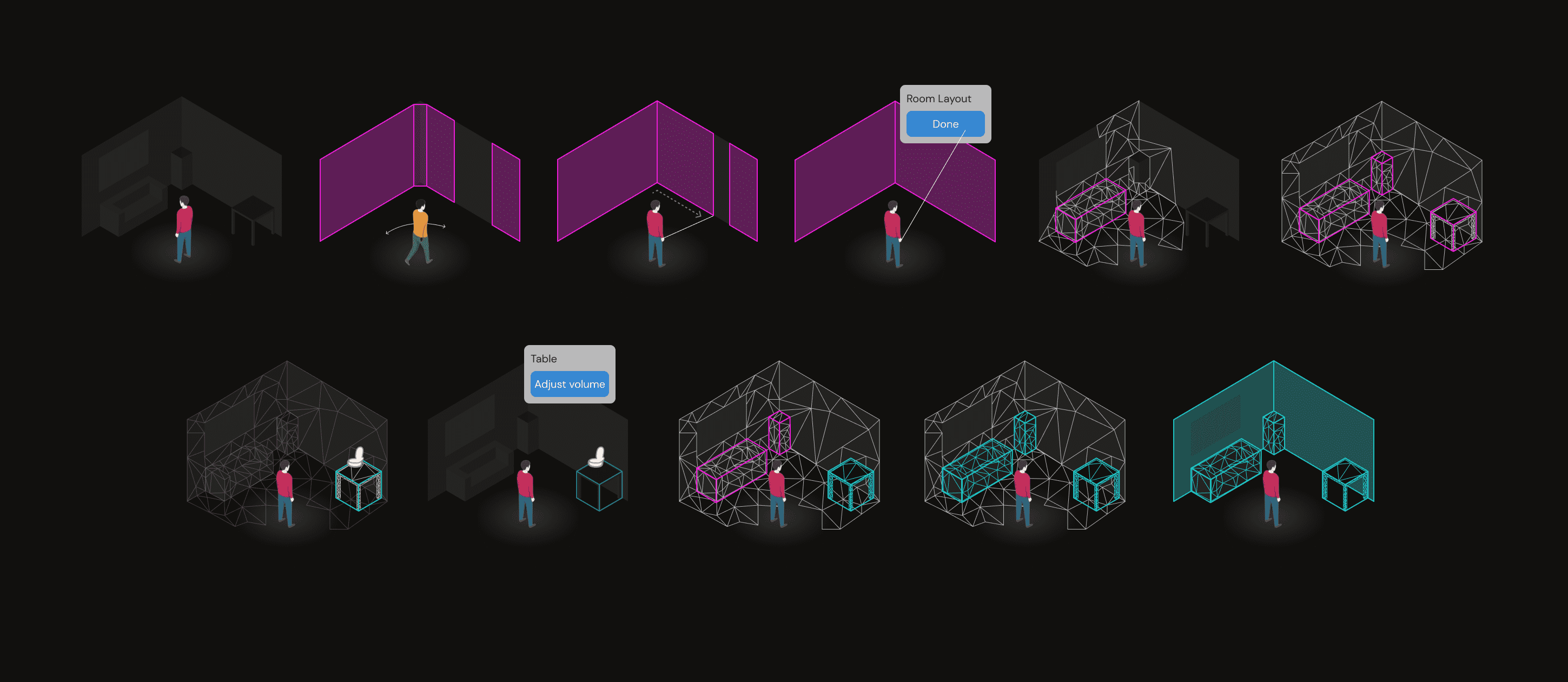
The Hybrid Capture Model
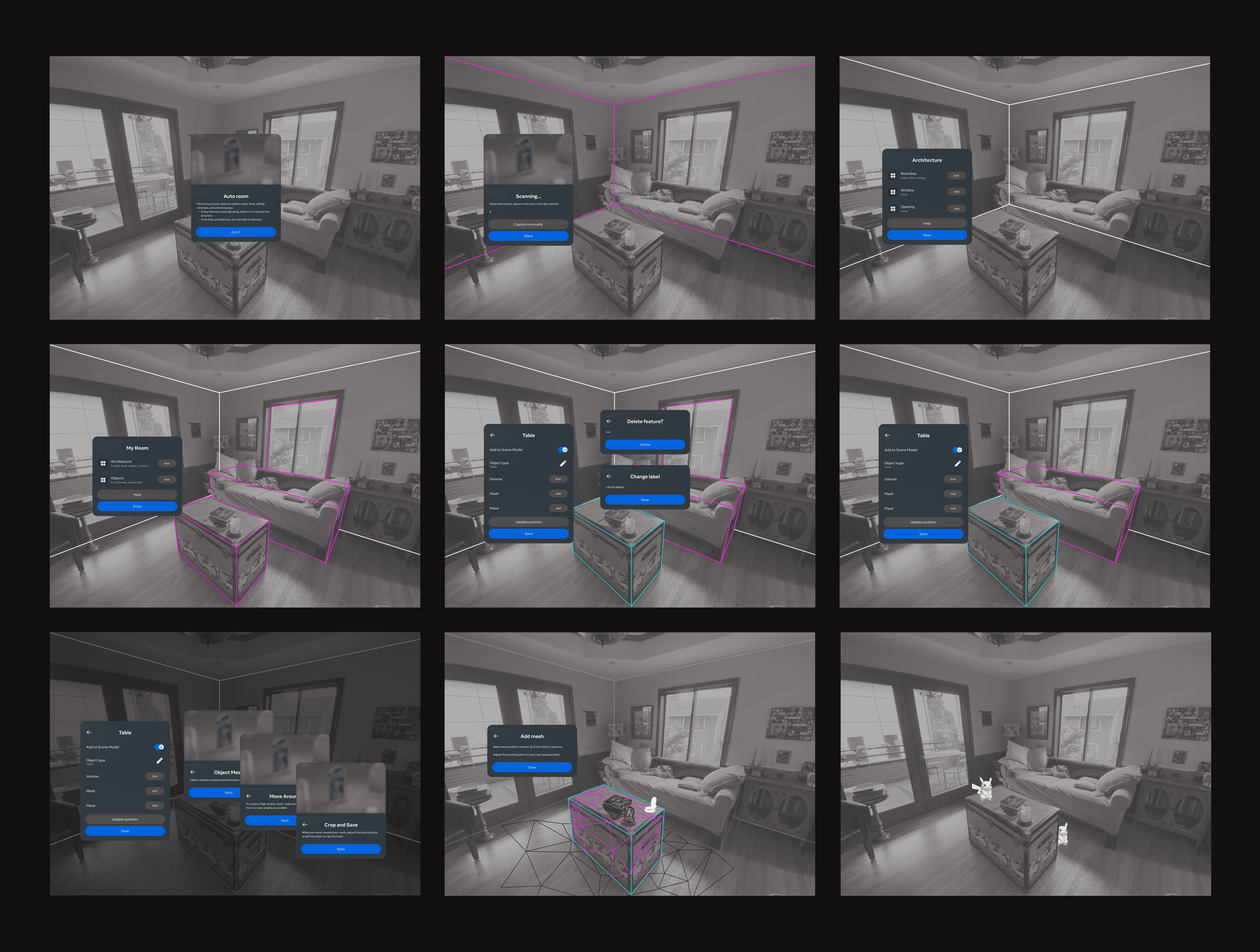
"We couldn't rely on full automation because the tech wasn't mature. I defined a 'Human-in-the-Loop' model: The machine suggests the geometry, and the human confirms or corrects it."
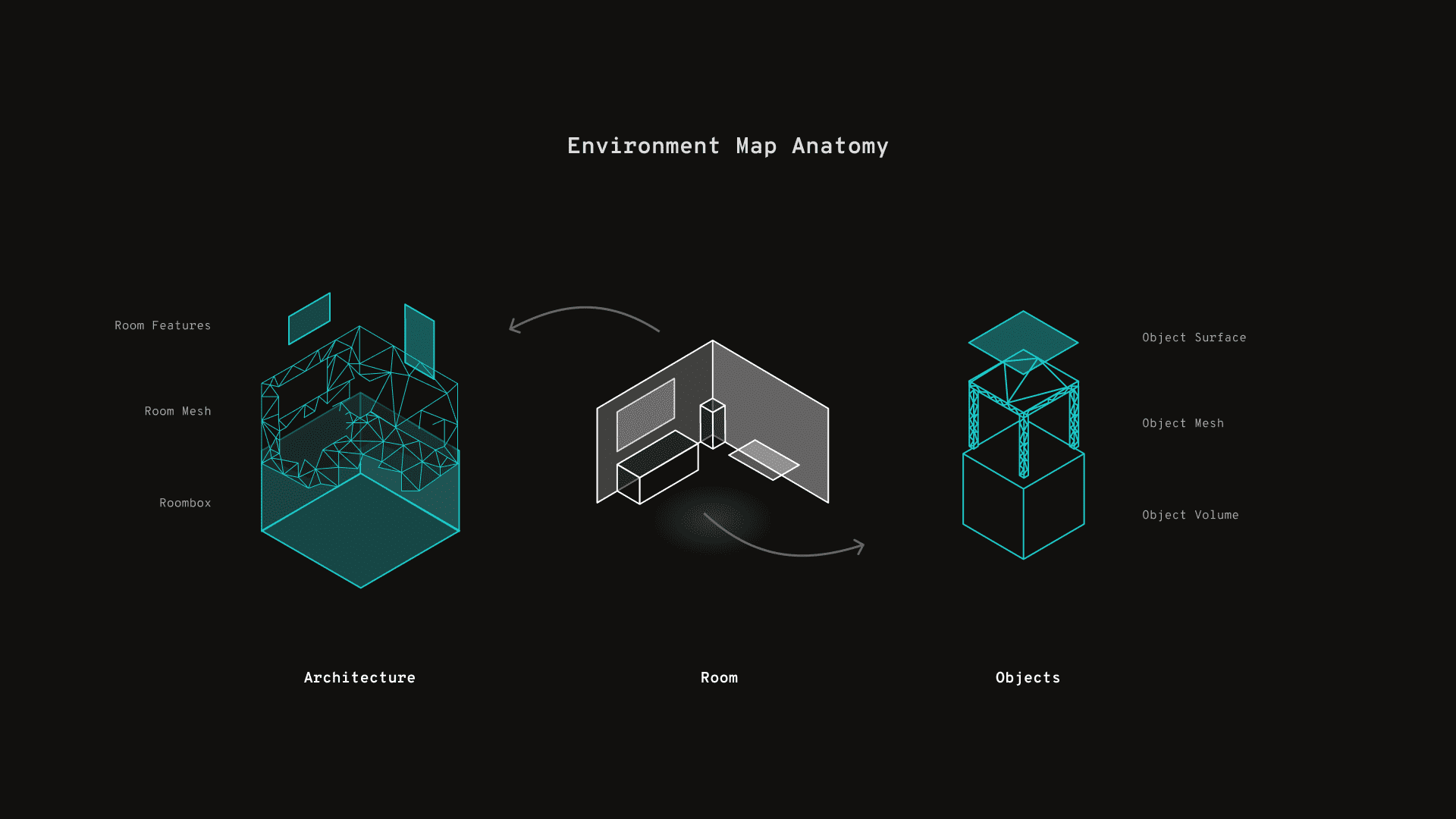
I broke the capture process down into four distinct primitives, allowing us to mix and match manual vs. automated steps depending on the hardware generation:
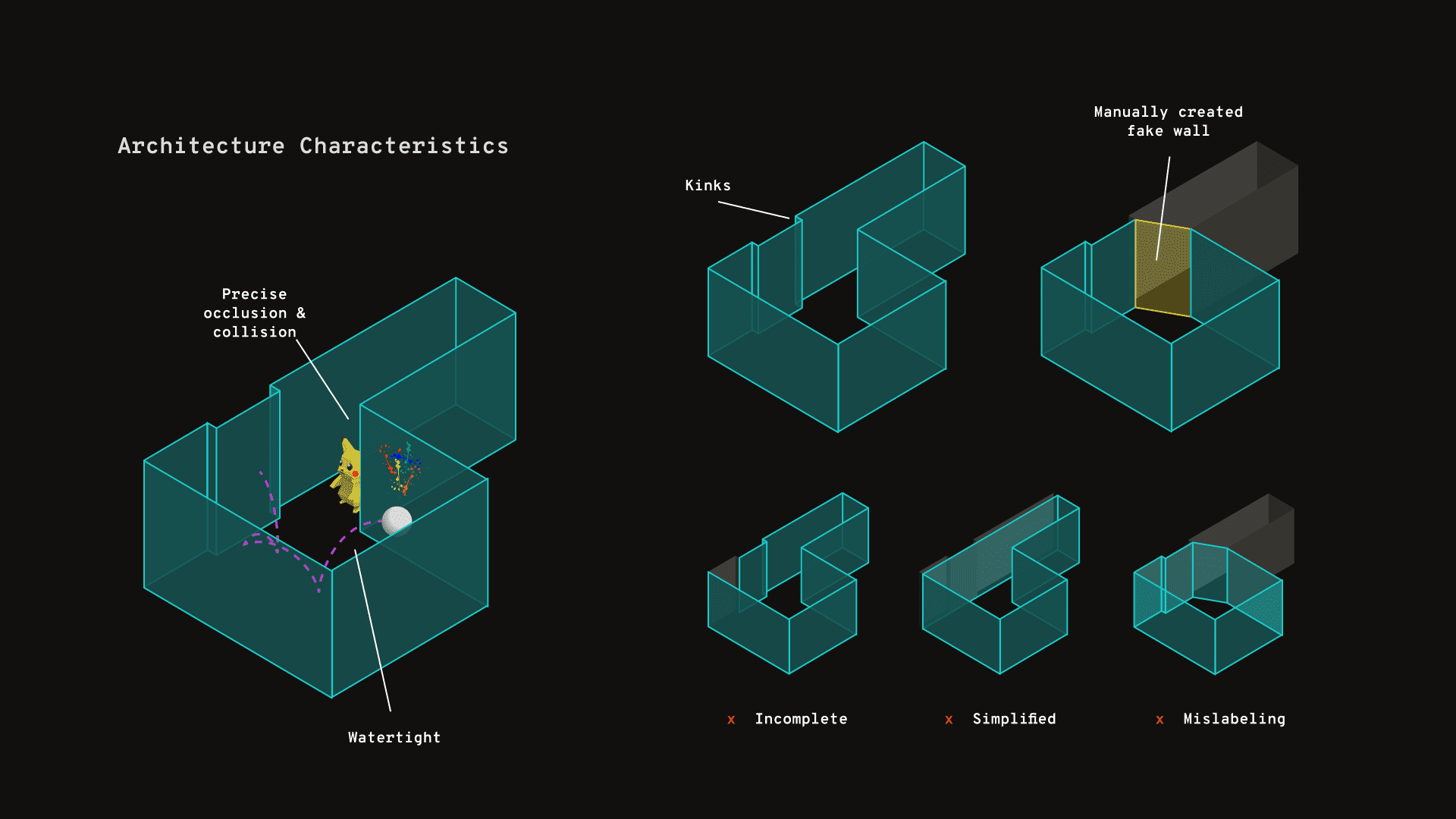
- Room Layout: (Walls, Ceiling, Floor)
- Architectural Features: (Windows, Doors)
- Object Volumes: (Couches, Tables - for collision)
- Object Meshes: (High fidelity visuals)
Designing for Failure
The most critical part of this work was not the "Happy Path," but the "Correction Path." What happens when the headset misses a wall? What happens if it thinks a couch is a table?
I designed a comprehensive fallback logic that allowed users to seamlessly take over when the algorithms failed.
03 // The Impact
From Experiment to SDK
This work moved environment capture from a research demo to a shipping platform capability.
- The Meta Spatial Scanner: The model I defined (Room → Planes → Objects) became the reference implementation for the Meta Spatial Scanner, now a core part of the Quest OS.
- Developer Standard: This framework is now embedded in the Spatial SDK, defining how thousands of third-party developers interact with user environments.
- Unblocking Progression: By providing an experieence that could handle "noisy" data, we enabled progression before the machine learning models were 100% perfect, ensuring Quest 3 could be launched on time.